



Description
This flight controller is based on the rapidly evolving and refined Ardupilot mega or “APM”, an open source project from 3DR robotics. This amazing flight controller allows the user to turn any fixed-wing, rotary wing, or multirotor vehicle (even boats and cars) into a fully autonomous vehicle, capable of performing a wide range of tasks even programmed GPS missions with waypoints with the optional GPS Module. It is a full autopilot capable of autonomous stabilization, way-point based navigation and support for two way telemetry with radio telemetry modules. It Supports 8 RC channels with 4 serial ports.
Various user interfaces are available for programing, reviewing logs, even some Apps for smartphones and tablets. The optional telemetry radio allows for two-way radio communication giving you full control and provides live data back to your computer or tablet. The list of what this flight controller is capable of has quickly been surpassed by what it cannot, with features, flight modes, and supported platforms. The APM project is supported by thousands of users pushing this open-source flight controller to be one of the best systems available.
The flagship Pixhawk module will be accompanied by new peripheral options, including a digital airspeed sensor, support for an external multi-colour LED indicator and an external magnetometer. All peripherals are automatically detected and configured.

We also have Good quality Pixhawk PX4 Autopilot PIX 2.4.8 32 with some Basic Differences as follows

Click Here to get Good Quality Pixhawk PX4 Autopilot PIX 2.4.8 32
Difference between PixHawk 2.4.6 and PixHawk 2.4.8 :
| Parameter | PixHawk 2.4.6 | PixHawk 2.4.8 |
| Barometer sensor. | MEAS MS5611 | MEAS MS5607 |
| Compass Module.(Magnetometer) | 3CLDW 303H | X4HBA 303H |
| RAM | 256 Kb | 128 Kb. |
| Connectors | Gold Plated | Tin Plated |
Features :
- The advanced 32-bit ARM CortexM4 high-performance processors can run NuttX RTOS real-time operating system.
- 14 PWM / servo output.
- Bus interface (UART, I2C, SPI, CAN).
- The integrated backup power and backup controller fails, the primary controller fails over to the backup control is safe.
- Provide automatic and manual modes.
- Provide redundant power input and failover.
- Multicolor LED lights.
- Provide multi-tone buzzer Interface.
- Micro SD recording flight data.
Detail Specifications :
Processor:
-
32bit STM32F427 Cortex M4 core with FPU.
-
32-bit STM32F103 failsafe co-processor.
-
168 MHz.
-
128 KB RAM.
-
2 MB Flash.
Sensors:
-
ST Micro L3GD20H 16 bit gyroscope.
-
ST Micro X4HBA 303H 14 bit accelerometer/magnetometer.
-
Invensense MPU 6000 3-axis accelerometer/gyroscope.
-
MEAS MS5607 barometer.
Interfaces:
-
5x UART (serial ports), one high-power capable, 2x with HW flow control.
-
2x CAN (one with an internal 3.3V transceiver, one on expansion connector).
-
Spektrum DSM / DSM2 / DSM-X® Satellite compatible input.
-
Futaba S.BUS® compatible input and output.
-
PPM sum signal input.
-
RSSI (PWM or voltage) input.
-
I2C.
-
SPI.
-
3.3 and 6.6V ADC inputs.
-
Internal micro USB port and external micro USB port extension.
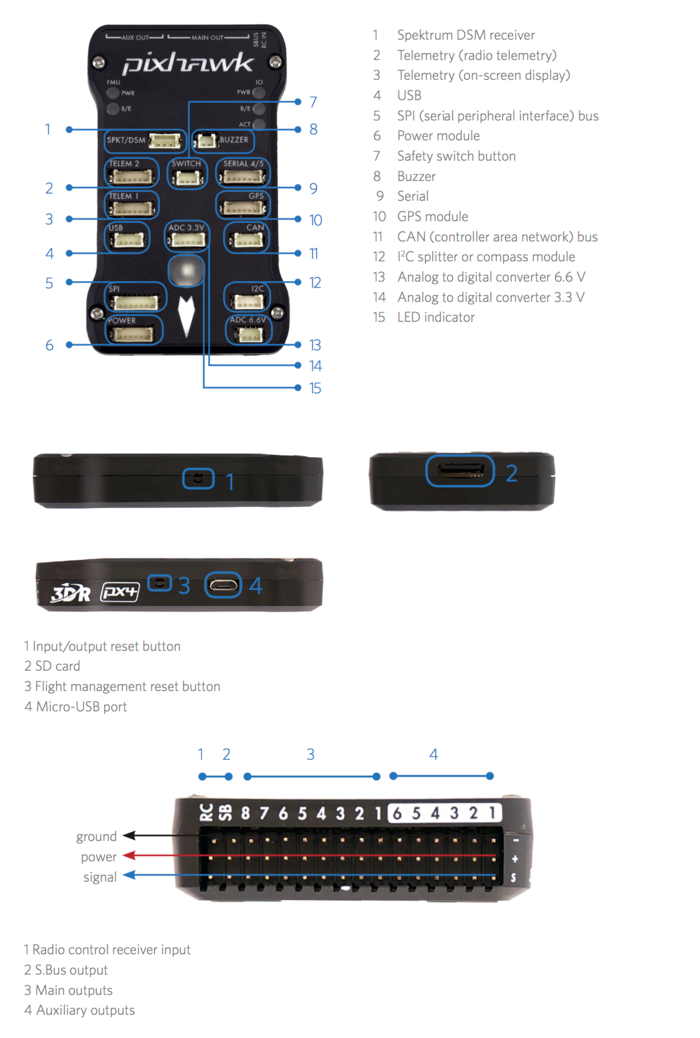
Connections Ports :




Reviews
There are no reviews yet.