
Description
What is an Ultrasonic Sensor?
An Ultrasonic sensor is a device that can measure the distance to an object by using sound waves. It measures distance by sending out a sound wave at a specific frequency and listening for that sound wave to bounce back.
Connection Diagram of the basic ultrasonic sensor operation

Since it is known that sound travels through air at about 344 m/s (1129 ft/s), you can take the time for the sound wave to return and multiply it by 344 meters (or 1129 feet) to find the total round-trip distance of the sound wave. Round-trip means that the sound wave traveled 2 times the distance to the object before it was detected by the sensor; it includes the ‘trip’ from the sonar sensor to the object AND the ‘trip’ from the object to the Ultrasonic sensor (after the sound wave bounced off the object). To find the distance to the object, simply divide the round-trip distance in half.
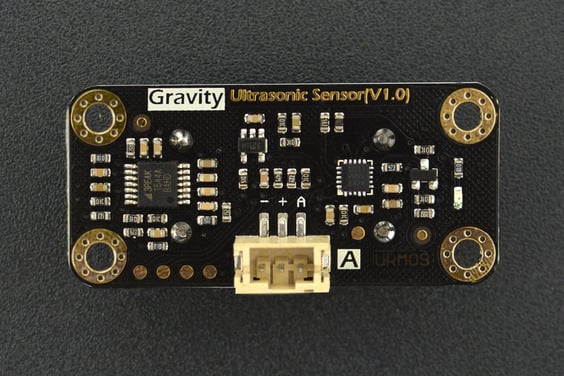
DFRobot URM09 is an ultrasonic sensor specially designed for fast-ranging and obstacle avoidance applications. Its measuring frequency can reach up to 30Hz. The sensor adopts built-in temperature compensation and analog output. Meanwhile, it can provide accurate distance measurement within 500cm. The sensor is compatible with Arduino, Raspberry Pi or other main-control boards with 3.3V or 5V logic levels.
Specifications:
- Power Supply: 3.3~5.5V DC
- Operating Current: 20mA
- Operating Temperature: -10℃~+70℃
- Measurement Range: 2cm~500cm
- Resolution: 1cm
- Accuracy: 1%
- Frequency: 30Hz Max
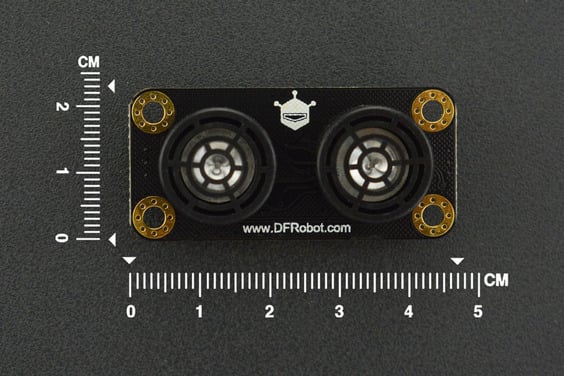
- Dimension: 47mm × 22 mm/1.85× 0.87”
Useful Link:
Product wiki
Package Includes:
1 x URM09 Ultrasonic Sensor (Gravity Analog)
1 x PH2.0-3P Connector



Reviews
There are no reviews yet.